LabView in Arduino, Python#
Naloga#
Naloga
Z uporabo prikazanih funkcij v LabView-u zajemite signal s predpisanimi parametri, pripravljen z uporabo generatorja signalov (individualizirane podatke najdete v e-učilnici).
Grafično predstavite “surove” podatke.
Na zajetem signalu smiselno prikažite uporabo predpisanih numeričnih postopkov (
obdelava_#v tabeli s podatki).
Pripravite kratko poročilo v okolju Jupyter Notebook (od 3 do 10 celic s kodo), iz katerega naj bodo razvidni podatki naloge (iz tabele), ter da ste vse parametre pri izvedbi naloge tudi upoštevali (ustrezno izpišite obliko signala…).
Poročilo oddajte v .pdf obliki (glejte navodila za oddajo domačih nalog).
Dodatek: Raziščite in prikažite uporabo frekvenčnega filtriranja podatkov, katerega namen je odprava neželenega visokofrekvenčnega šuma v zajetem signalu (uporabite lahko scipy.signal.lfilter). Pred tem zajetemu signalu po potrebi dodajte aditivno naključno komponento (šum).
Kljub sicer zaprti strukturi je del LabView ekosistema tudi upravljalnik paketov “VI Package manager (VIPM)”, kjer lahko uporabniki delijo LabView kodo in pakete, s katerimi je mogoča uporaba funkcionalnost in opreme, ki je sam LabView sicer ne podpira.
Namestitev LabView Community Edition
Za nekomercialno rabo je brezplačno na voljo LabView Community Edition, ki omogoča uporabo vseh osnovnih funkcij LabView-a, ki jih potrebujemo pri Procesiranju signalov.
LabView Community Edition je že pripravljen za uporabo s sistemom Arduino, ki ga bomo pri temu predmetu uporabljali za zajem signalov. Če želite preizkusiti delovanje programa na lastni opremi, sledite navodilom na tejle povezavi.
LabView Hobbyist Toolkit#
Eden izmed brezplačnih paketov, razvitih s strani skupnosti, je tudi LabView Hobbyist Toolkit (nekoč LINX), ki omogoča uporabo LabView za upravljanje s strojno opremo Arduino, Raspberry Pi, in BeagleBone Black.
Če ste namestili LabView Community Edition, je LabView Hobbyist Toolkit na vašem sistemu že nameščen.
Note
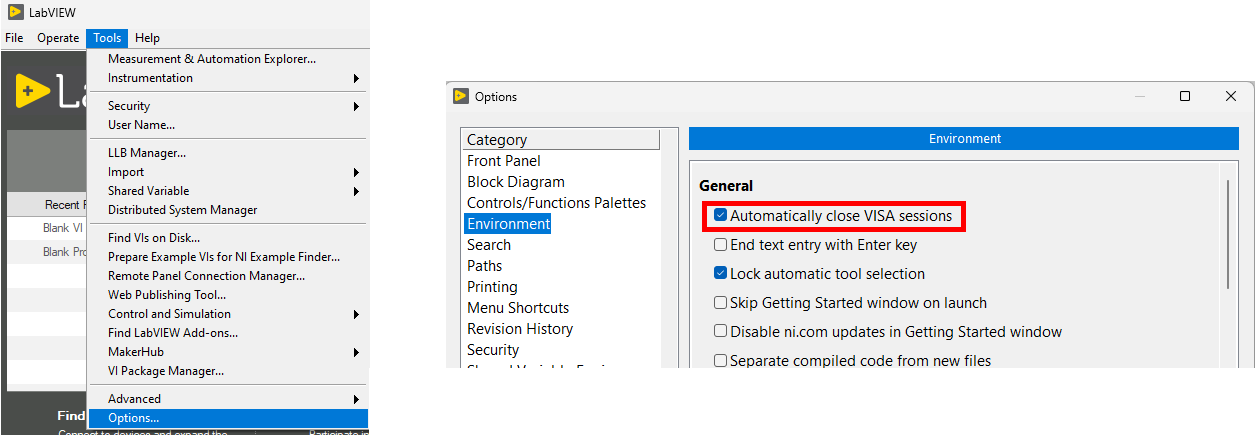
Za lažje delo z zajemnim sistemom Arduino v nadaljevanju je priporočljivo, da v nastavitvah programa LabView v meniju Tools > Options > Environment označite možnost Automatically close VISA sessions.
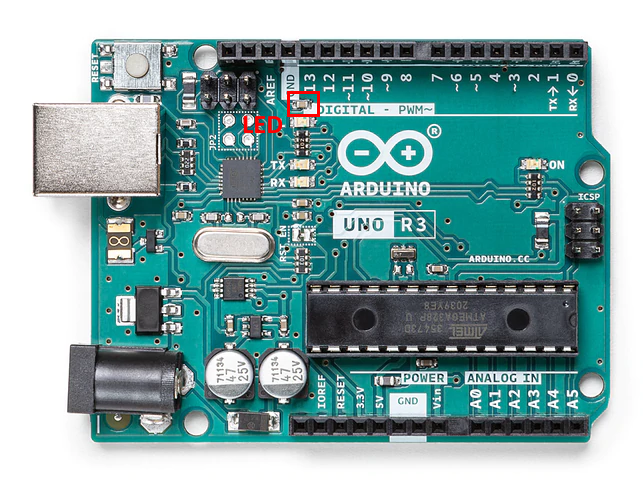
Arduino Uno (Atmega328p)#
Pri Procesiranju signalov bomo zaradi enostavne integracije v LabView zajemne sisteme in možnosti analogno-digitalne pretvorbe spoznali osnove uporabe razvojne plošče Arduino Uno, ki temelji na mikrokrmilniku Atmega328p.
Specifikacije plošče Arduino Uno, bistvene pri aplikacijah analogno digitalne pretvorbe in zajema signalov, so zbrane v spodnji tabeli.
Parameter |
Vrednost |
|---|---|
Število analognih vhodov |
|
ADC bitna globina |
|
USB napajalna napetost (VCC) |
|
Območje merjenja napetosti |
|
Limite vhodne napetosti |
|
Opozorilo
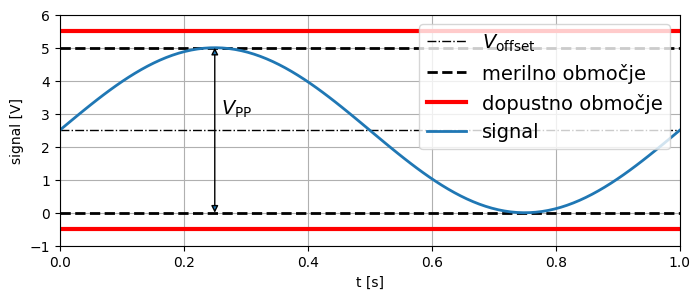
Pri zajemu signalov moramo biti pozorni, da ne presežemo ekstremov dovoljenih vrednosti vhodne napetosti zajemne naprave.
Merilno območje Arduina je (0-5 V), območje dopustnih napetosti* v našem primeru pa (-0.5-5.5 V) (glej zgornjo tabelo). Če presežemo merilno območje naprave signala ne bomo zajeli v celoti, če presežemo dopustno napetost pa lahko poškodujemo zajemni sistem!
* Omejitev dopustne napetosti je še strožja, kadar sistem ni napajan (VCC = 0). Če napajalni kabel (USB) Arduina ni povezan z USB priključkom, ki omogoča napajanje z napetostjo 5V, je območje dopustnih napetosti (-0.5-0.5 V)!
Pred zajemom signalov z Arduinom (preden priključimo signalni kabel na vhodni terminal) moramo torej vedno preveriti, da je sistem napajan preko USB povezave, ter da signal, ki ga priključimo na kateregakoli od vhodnih terminalov, v mejah:
V_offset = 2.5
V_pp = 5
LabView in Arduino#
Paket LINX omogoča dostop do analognih vhodnih kanalov ter digitalnih I/O kanalov Arduino plošče iz LabView-a. Podpira tudi povezavo Arduina z zunanjimi napravami, na primer preko SPI ali I2C serijske povezave.
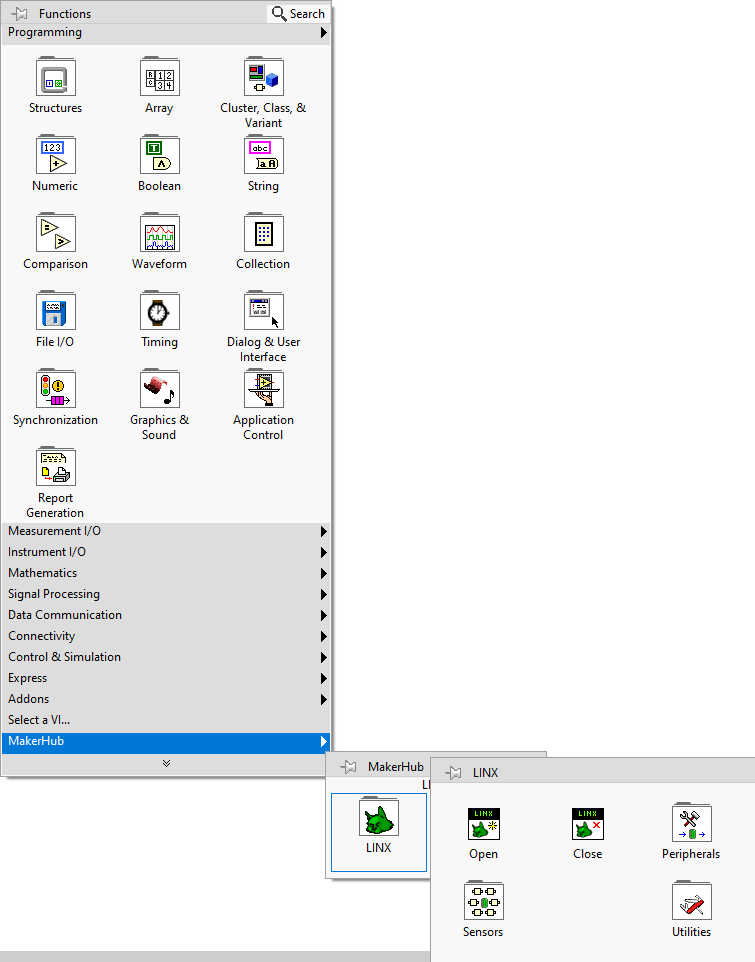
Do podprtih programskih elementov dostopamo preko posebnega menija v naboru funkcij blokovnega diagrama, MakerHub -> LINX.
Povezava z Arduinom in prvi program#
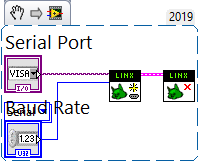
Za vzpostavitev povezave z Arduinom v LabView-u uporabimo posebno funkciji knjižnice LINX, Open.
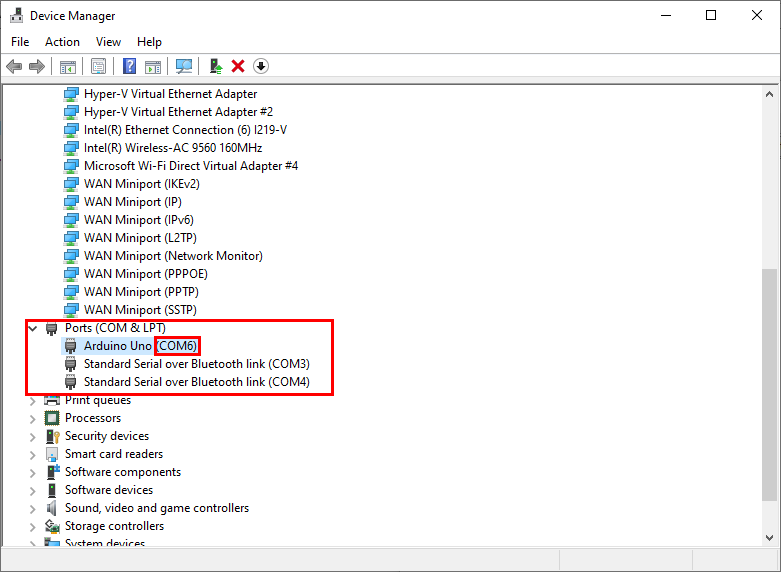
Osnovni parameter pri odpiranju povezave so COM serijska vrata, preko katerih je Arduino povezan na naš računalnik. Če je v sistem povezanih več podobnih serijskih naprav, lahko serijska vrata povezanega Arduina najdete z orodjem Upravitelj naprav (Device Manager).
Druga pomembna nastavitev je hitrost serijske povezave (baud rate) z Arduinom. Privzeta vrednost je 9600, najvišja, ki jo Arduino Uno dopušča, pa 115200.
Če zgoraj niste vključili možnosti “Automatically close VISA sessions”, morate po zaključenem delu z Arduinom povezavo zapreti s funkcijo Close, sicer boste pri ponovnem poskusu vzpostavitve povezave imeli težave.
Avtomatizacija z Arduinom - digitalni I/O terminali#
Čeprav Arduino vključuje relativno zmogljiv 10-bitni analogno-digitalni pretvornik s 6 analognimi vhodnimi kanali, zaradi relativno omejene procesorske moči pogosto ni optimalna izbira za naprednejše aplikacije zajema signalov (za potrebe tega predmeta pa so zmogljivosti Arduina seveda zadostne).
Bolj tipično področje uporabe je zato avtomatizacija in integracija različnih merilnih elementov in strojne opreme. To omogoča širok nabor večnamenskih digitalnih I/O terminalov (GPIO).
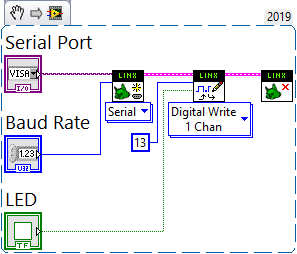
Poglejmo si osnovno uporabo GPIO kanalov Arduina, na primeru vklopa / izklopa LED luči, integrirane na Arduino plošči, katere stanje je povezano z vrednostjo GPIO terminala 13.
Za zapis Boolean vrednosti ustreznega GPIO terminala bomo uporabili funkcijo Makerhub -> LINX -> Peripheral -> Digital -> Write.

Naloga 1
Pripravimo LabView program, ki:
vzpostavi povezavo z Arduinom na izbranih serijskih vratih,
na digitalni terminal št.
13zapiše izbranoBooleanvrednost,zapre povezavo z Arduinom.
Naloga 2 (5 minut)
Zgornji program nadgradite tako, da:
omogoča nastavitev stanja LED luči (vklop / izklop) v realnem času,
po zapisu stanja zgodovino stanj izrisuje na grafu.
Namig: na prejšnji vaji smo na grafu izrisovali numerične vrednosti, prebrano stanje digitalnega terminala pa je treba pred prikazom ustrezno pretvoriti!
Zajem podatkov z Arduinom#
Pri zajemu podatkov gre običajno za pretvorbo merilnega signala (el. napetost) v digitalno obliko, ki poteka na A-D pretvorniku. Arduino Uno ima na voljo 6 analognih vhodov, ki so povezani na ADC komponento plošče.
Za pretvorbo in zajem posamezne točke signala na analognih vhodih lahko uporabimo funkcijo “AnalogRead” (Makerhub -> LINX -> Peripheral -> Analog -> Read), ki omogoča hkratni zajem na več kanalih.
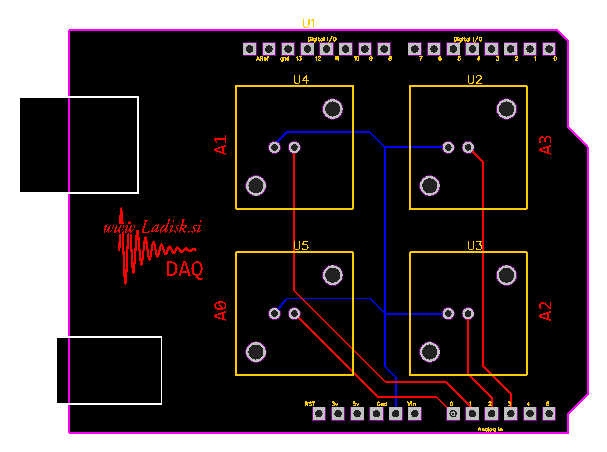
Note
Vezje, ki ga bomo pri Procesiranju signalov uporabili skupaj z Arduinom za povezavo zunanjih signalov z analognimi vhodi plošče preko koaksialnih, BNC priključkov, omogoča uporabo analognih kanalov A0 in A1.
Naloga 3
Pripravimo LabView program, ki:
vzpostavi povezavo z Arduinom na izbranih serijskih vratih,
v zanki zajeto nastavljeno število podatkov iz dveh analognih vhodnih kanalov izriše na graf.
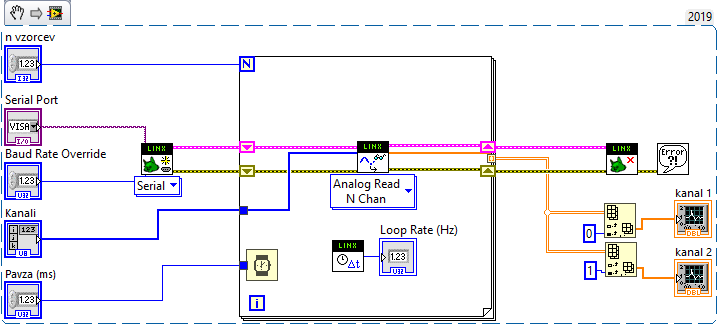
Note
Oblika podatkov, pridobljenih iz N kanalov pri nastavitvi v n iteracijah zanke, je (n, N) (torej n vrstic, N stolpcev).
Podatke, zajete na posameznem analognem kanalu, dobimo z izbiro posameznega stolpca (col) v dobljenem array-u, z uporabo Array -> Index Array funkcije blokovnega diagrama.
Note
Ker so pridobljeni podatki po izbranem številu iteracij zanke zajema sedaj v obliki polja (array), za njihov prikaz uporabimo funkcijo “Waveform Graph” (Graph -> Waveform Graph na krmilni plošči).
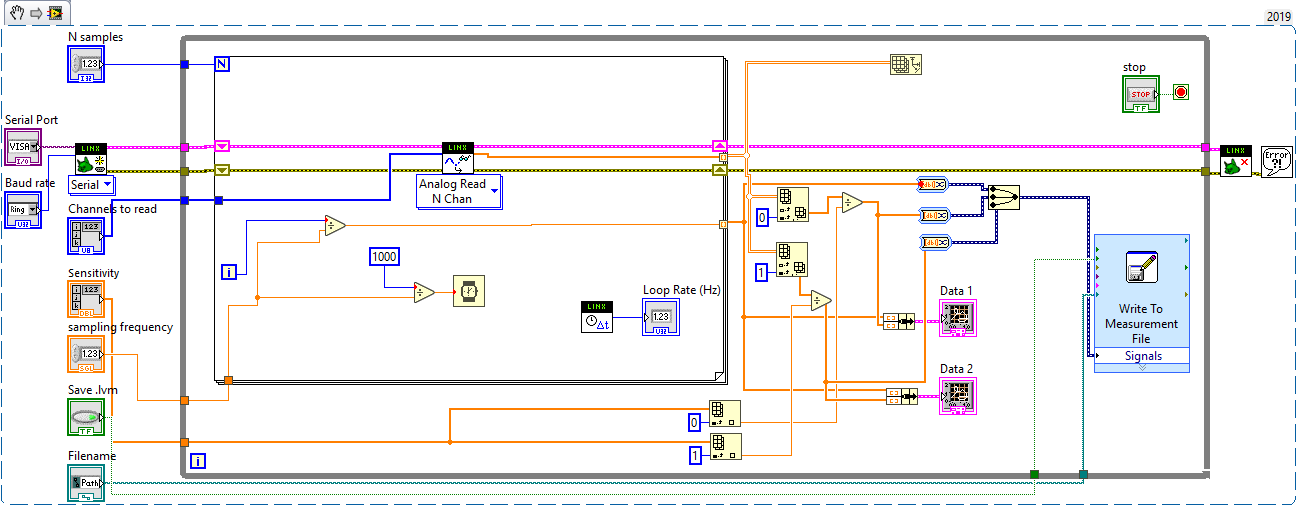
Naloga 4 (10 minut)
Zgornji program nadgradite tako, da:
namesto trajanja pavze med zaporednimi iteracijami zajema omogoča izbiro frekvence vzorčenja [Hz],
omogoča izbiro števila zajetih segmentov signala z
nvzorci,omogoča shranjevanje signala v
.lvmdatoteko.
Tako smo dobili enostaven sistem, ki ga že lahko uporabimo za zajem realnih merilnih signalov.
Zmogljivosti takega sistema so seveda omejene. Pri merjenju običajno želimo nadzorovati čim več parametrov merilne opreme. Naslednji primer VI omogoča tudi določitev občutljivosti posameznih merilnih kanalov ter shranjevanje neodvisne spremenljivke (časa) skupaj z zajetimi signali.
Naslednji primer pa omogoča tudi krmiljenje dejanjske frekvence vzorčenja v enostavni povratni zanki:
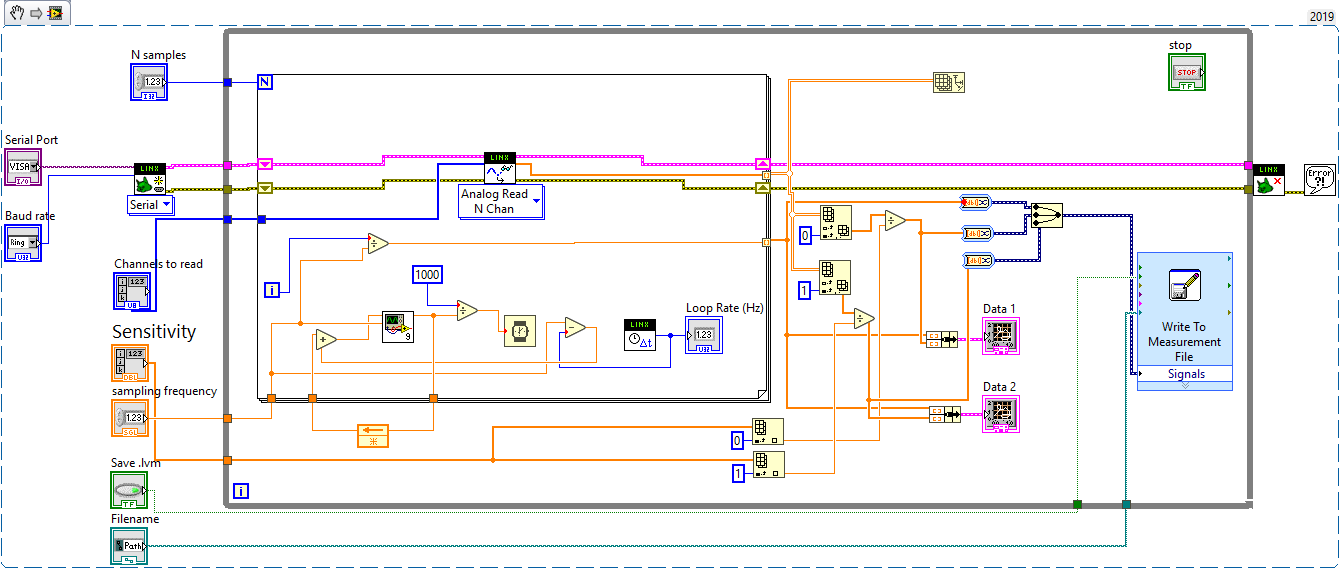
Pri tem je uporabljen tudi naslednji podprogram:
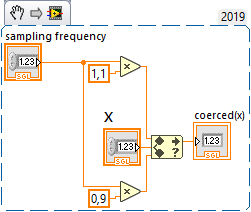
Oboje lahko prenesete tudi v obliki zip arhiva.
Python - branje in obdelava zajetih signalov#
Pri branju podatkov, shranjnih v .lvm datoteke, si lahko pomagate s paketom lvm_read.
Primer uporabe si poglejmo spodaj.
import lvm_read
file = 'data/02/test_01.lvm'
loaded_data = lvm_read.read(file)
loaded_data.keys()
dict_keys(['Decimal_Separator', 'Writer_Version', 'Reader_Version', 'Separator', 'Multi_Headings', 'X_Columns', 'Time_Pref', 'Operator', 'Date', 'Time', 0, 'Segments'])
Naloženi podatki so strukturirani v obliki slovarja. Podatek 'Segments nam pove, koliko segmentov smo zajeli:
loaded_data['Segments']
1
segment podatkov pa je v slovarju shranjen s ključem zaporednega indeksa. Če je shranjen segment samo eden, je edini indeks, ki je na voljo, 0.
loaded_data[0].keys()
dict_keys(['Channels', 'Samples', 'Date', 'Time', 'X_Dimension', 'X0', 'Delta_X', 'data', 'Channel names'])
Vsak posamezni segment je prav tako slovar, v katerem do surovih shranjenih podatkov dostopamo s ključem 'data':
loaded_data[0]['data'].shape
(100, 2)
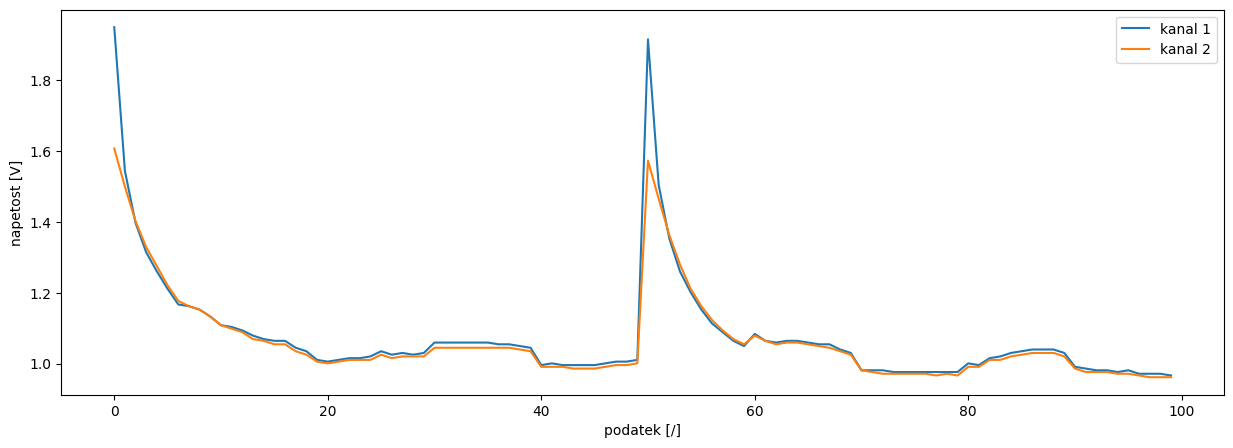
Posamezni stolpci podatkov predstavljajo po en shranjen kanal:
kanal_1, kanal_2 = loaded_data[0]['data'].T
plt.figure()
plt.plot(kanal_1, label='kanal 1')
plt.plot(kanal_2, label='kanal 2')
plt.xlabel('podatek [/]')
plt.ylabel('napetost [V]')
plt.legend()
<matplotlib.legend.Legend at 0x7f4cab982490>
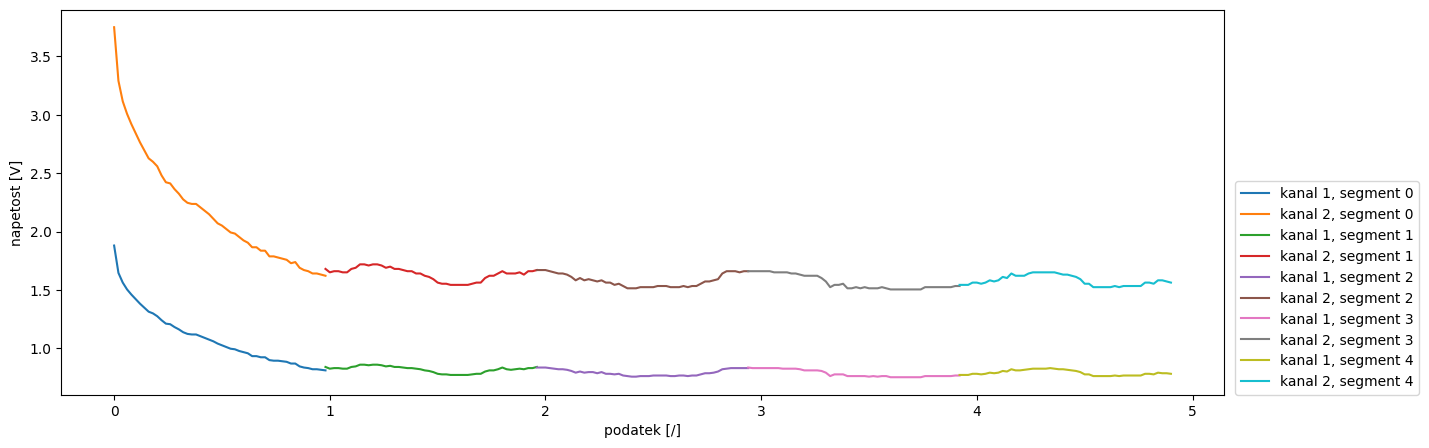
Poglejmo še primer, ko je v .lvm datoteki shranjenih več segmentov, ki so pri shranjevanju ločeni z glavami (header):
file_2 = 'data/02/test_segments.lvm'
loaded_data_2 = lvm_read.read(file_2)
loaded_data_2['Segments']
5
Po shranjenih segmentih lahko iteriramo:
all_segments = []
for seg in range(loaded_data_2['Segments']):
all_segments.append(loaded_data_2[seg]['data'])
Datoteka v tem primeru vsebuje tudi stolpec neodvisne spremenljivke (časa):
plt.figure()
t_start = 0
for i, segment in enumerate(all_segments):
t, k1, k2 = segment.T
t_segment = t + t_start
t_start = t_segment[-1]
plt.plot(t_segment, k1, label=f'kanal 1, segment {i}')
plt.plot(t_segment, k2, label=f'kanal 2, segment {i}')
plt.xlabel('podatek [/]')
plt.ylabel('napetost [V]')
plt.legend(loc=(1.01, 0))
<matplotlib.legend.Legend at 0x7f4cab5225d0>
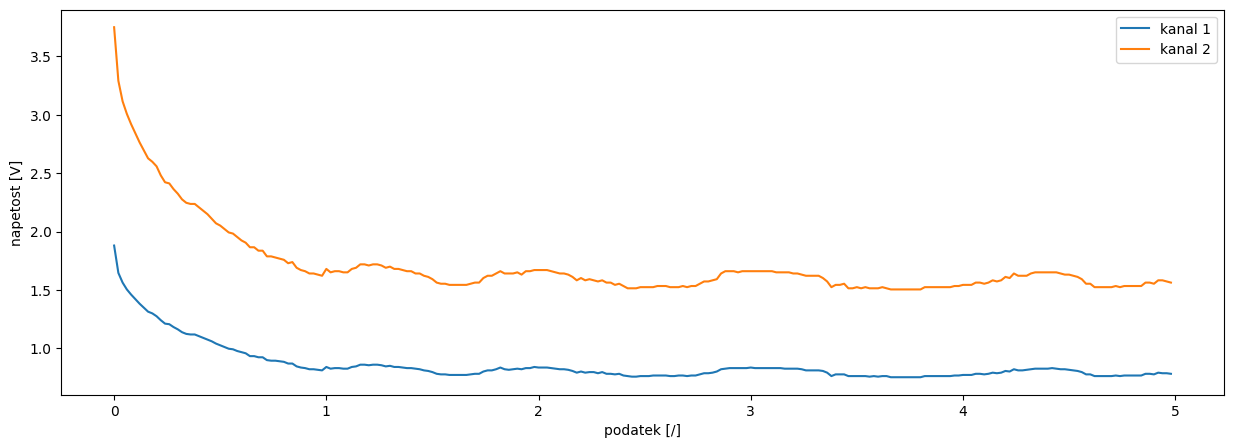
Lahko pa vse segmente združite (in poljubno obdelujete) z uporabo ustreznih Numpy funkcij:
complete_data = np.concatenate(all_segments)
complete_data.shape
(250, 3)
_, channel_1, channel_2 = complete_data.T
dt = _[1] - _[0]
t_complete = np.arange(len(channel_1)) * dt
plt.figure()
plt.figure()
plt.plot(t_complete, channel_1, label='kanal 1')
plt.plot(t_complete, channel_2, label='kanal 2')
plt.xlabel('podatek [/]')
plt.ylabel('napetost [V]')
plt.legend()
<matplotlib.legend.Legend at 0x7f4cabbb5e50>
<Figure size 1500x500 with 0 Axes>
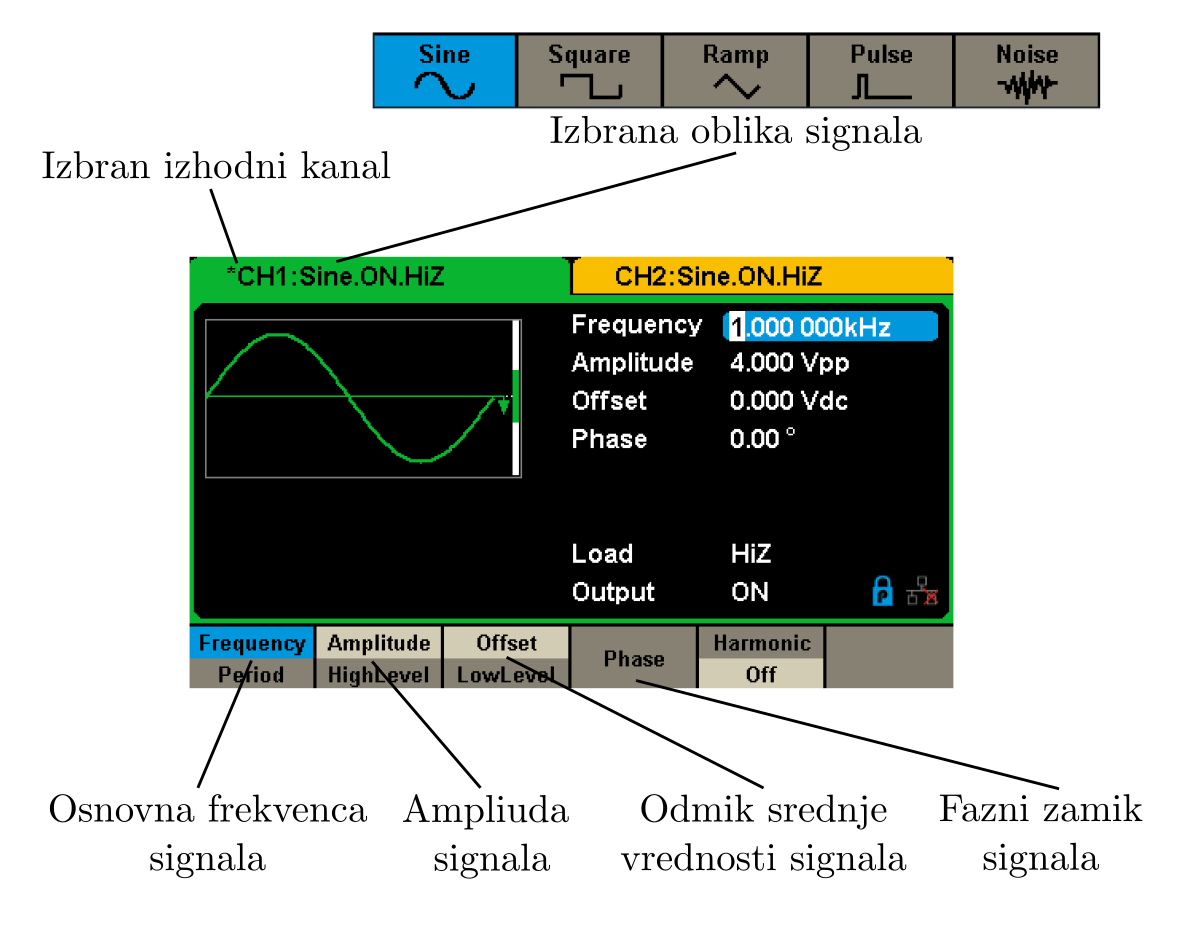
Uporaba generatorja signalov (Siglent SDG 1032X)#
Za simulacijo predpisane oblike periodičnega signala bomo uporabili generator signala.
Spodanja slika prikazuje nadzorno ploščo modela Siglent SDG 1032X.
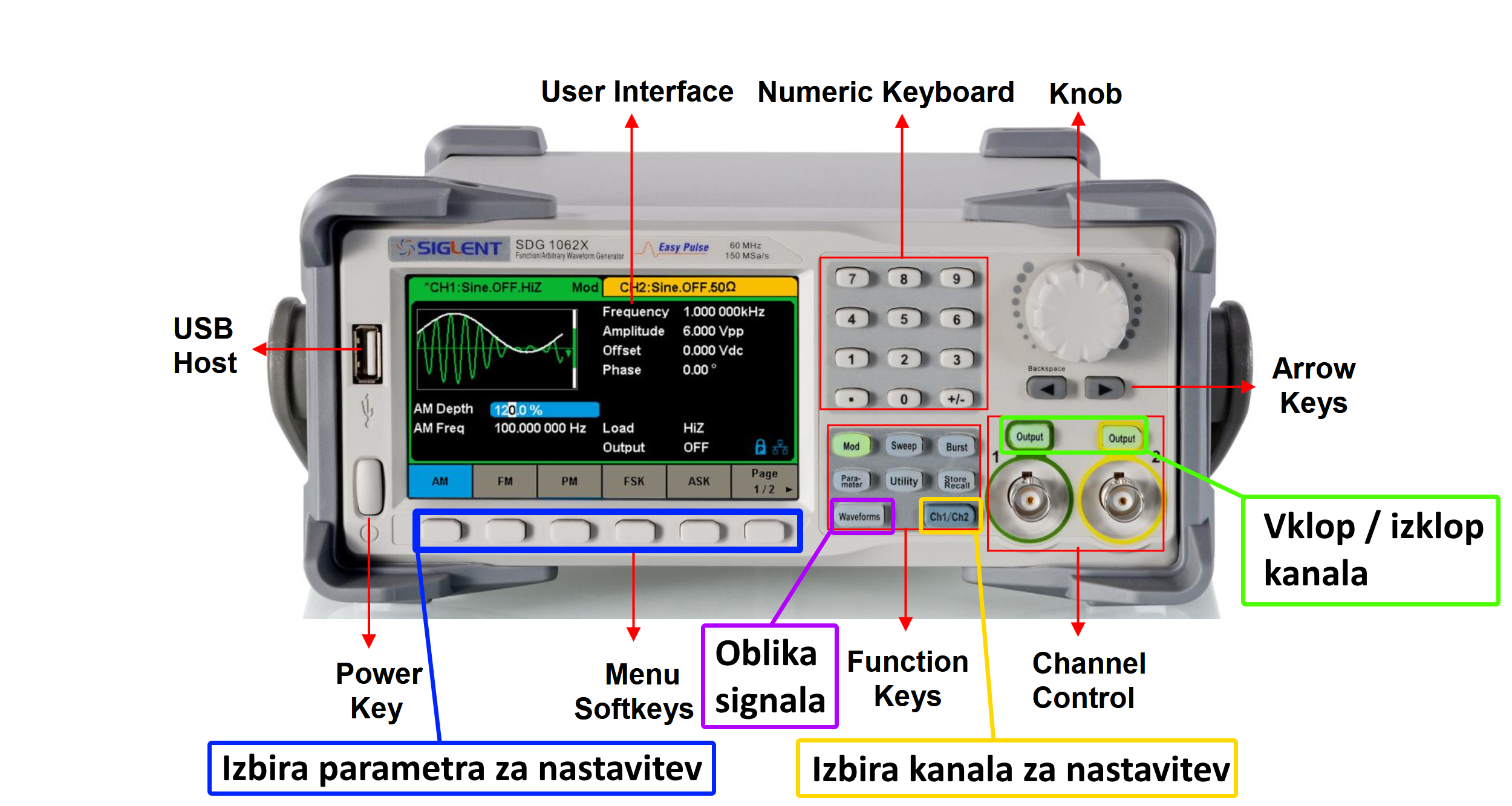
Za izbiro parametra signala, ki ga želite nastaviti, uporabite kontrolne gumbe, na zgornji sliki označene z modro barvo. Vrednost izbranega parametra spreminjate s številčnico ali vrtljivim gumbom. Pri tem bodite pozorni, da ste z gumbom Ch1 / Ch2 (rumena barva) izbrali kanal, za katerega želite nastaviti signal. V pomoč pri nastavitvah podanih parametrov naj vam bo spodnja slika.
Meni za izbiro oblike generiranega signala prikličete z gumbom Waveforms (vijolična barva). Nazaj v meni za nastavitev parametrov signala pridete z gumbom Ch1 / Ch2 (rumena barva) ali gumbom Parameter.
Generator signala signal oddaja preko koaksialne (BNC) povezave na desni strani krmilne plošče. Oddajanje nastavljenega signala poteka, kadar je osvetljen Output gumb izbranega kanala (zelena barva).
Za več informacij glejte tudi kratek uporabniški priročnik.
Opozorilo
Preden vključite oddajanje signala z ustreznim Channel gumbom preverite, da so vse nastavitve izbranega kanala pravilne, in da niste presegli merilnega območja zajemnega sistema. Šele za tem priključite zajemni sistem na izhodni kanal generatorja signala!