Linearni, časovno invariantni (LTI) sistemi 2 - prenosne funkcije#
Domača naloga#
Domača naloga
Na podlagi meritev nosilca, ki ste jih v skupini zajeli na prejšnji vaji, izračunajte in prikažite frekvenčne prenosne funkcije pospešenosti za vse pomerjene lokacije vzbujanja na nosilcu. Pri obdelavi zajetih signalov ustrezno uporabite eksponentno okno ter “force” okno s parametri iz podatkov naloge.
Pripravite kratko poročilo (obseg od 3 do 10 celic s kodo v okolju Jupyter Notebook), iz katerega naj bodo razvidni podatki naloge (iz tabele), ter da ste vse parametre in zahteve naloge naloge tudi upoštevali.
Poročilo oddajte v .pdf obliki (glejte navodila za oddajo domačih nalog).
Dodatek: Na podlagi pripravljenih FPF pri različnih točkah nosilca ocenite prvo lastno obliko obravnavanega nosilca.
Lastna oblika podaja razmerje amplitud odziva sistema na vzbujanje v različnih točkah \(i\):
kjer so \(A^r_i\) t. i. modalne konstante sistema pri lastni frekvenci \(\omega_r\).
Modalne konstante lahko ocenite s poljubno metodo (glejte spodnji zaznamek).
Za identifikacijo modalnih konstant lahko uporabite tudi paket sdypy-EMA. Pomagate si lahko s temle primerom uporabe.
Metoda največjih amplitud
Ena najpreprostejših metod modalne identifikacije je metoda največjih amplitud (Peak amplitude, tudi Peak Picking method), zapisana tukaj za frekvenčno prenosno funkcijo pospešenosti (\(A(\omega)\)):
\(\omega_r = \text{arg max}(|A(\omega)|)\) (krožna frekvenca resonančnega vrha)
\(\eta_r = \frac{\omega_a - \omega_b}{\omega_r}\) (razmernik dušenja), kjer sta \(\omega_a\) in \(\omega_b\) t. i. točki polovične moči v okolici \(\omega_r\):
\(|A(\omega_{a, b})| = \frac{|A(\omega_r)|} {\sqrt{2}}\)
Iz FPF za posamezno obravnavano točko \(i\) pa lahko določite modalne konstante:
\(A^r_i = |A_i(\omega_r)| \, \eta_r\)
Frekvenčna prenosna funkcija podajnosti \(\alpha(\omega)\) predstavlja razmerje med (kompleksnimi) amplitudami harmonskega odziva (pomikov) in vzbujanja (sile) za opazovan sistem:
Impulzna prenosna funkcija \(h(t)\) podaja odziv sistema na impulzno motnjo.
Odziv na poljubno vzbujanje (signal \(f(t)\)) določa naslednja zveza:
kjer \(*\) označuje konvolucijo.
Note
Impulzna prenosna funkcija in frekvenčna prenosna funkcija sta Fourierov par:
Note
Oblike frekvenčih prenosnih funkcij
Opis LTI sistemov#
Odzivni model LTI sistema opišemo z njegovo prenosno funkcijo.
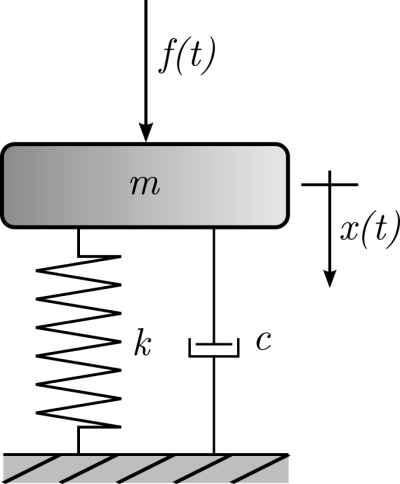
Poglejmo primer enostavnega linearnega oscilatorja, ki ga opisuje gibalna enačba:
Frekvenčna domena#
Frekvenčna prenosna funkcija podajnosti dušenega linearnega oscilatorja je podana z:
Laplace-ova domena
Fourierova transformacija je posebna oblika Laplace-ove transfomacije, ki jo pogosto uporabimo za pretvorbo diferencialnih enačb v algebrajske enačbe.
Velja naslednja zveza med frekvenčno (\(\omega\)) in Laplace-ovo (\(s\)) domeno:
\(s = \mathrm{i} \, \omega\)
Zgornjo prenosno funkcijo linearnega oscilatorja v \(s\)-domeni tako zapišemo:
Poglejmo konkreten primer:
m = 2
k = 50
c = 2.5
freq = np.linspace(0, 10, 101)
w = 2*np.pi*freq
def H_f(freq, m, k, c):
"""
Frekvenčna prenosna funkcija linearnega oscilatorja.
"""
omega = 2*np.pi*freq
return 1 / (-omega**2*m + 1j*omega*c + k)
def H_s(freq, m, k, c):
"""
Prenosna funkcija linearnega oscilatorja v s-domeni.
"""
omega = 2*np.pi*freq
s = 1j*omega
return 1 / (m*s**2 + c*s + k)
Naloga 1 (10 minut): uporaba scipy.signal.lti
Sistem linearnega oscilatorja definirajte z uporabo scipy.signal.lti. Pomagajte si z dokumentacijo.
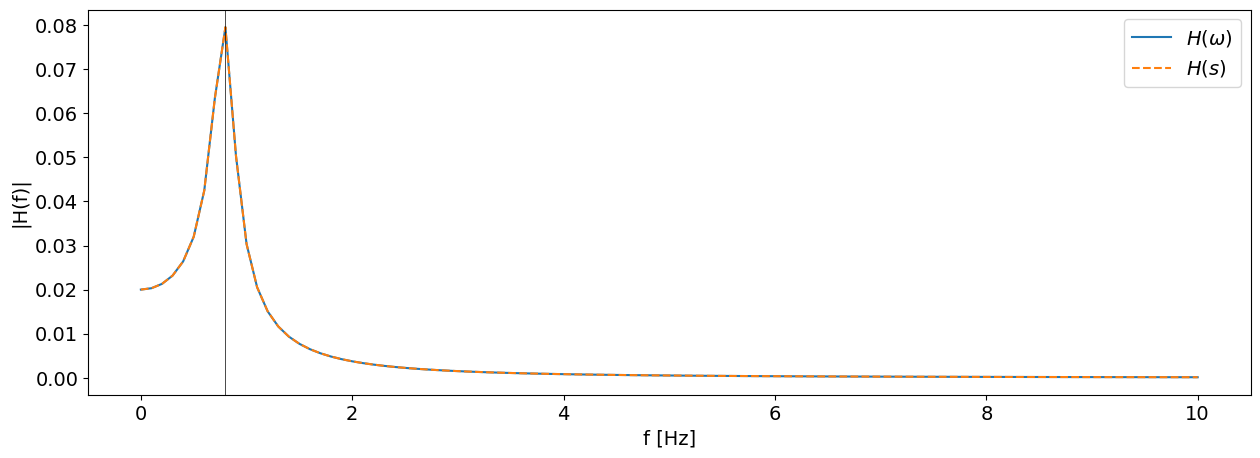
Pri tem uporabite prenosno funkcijo sistema v \(s\)-domeni:
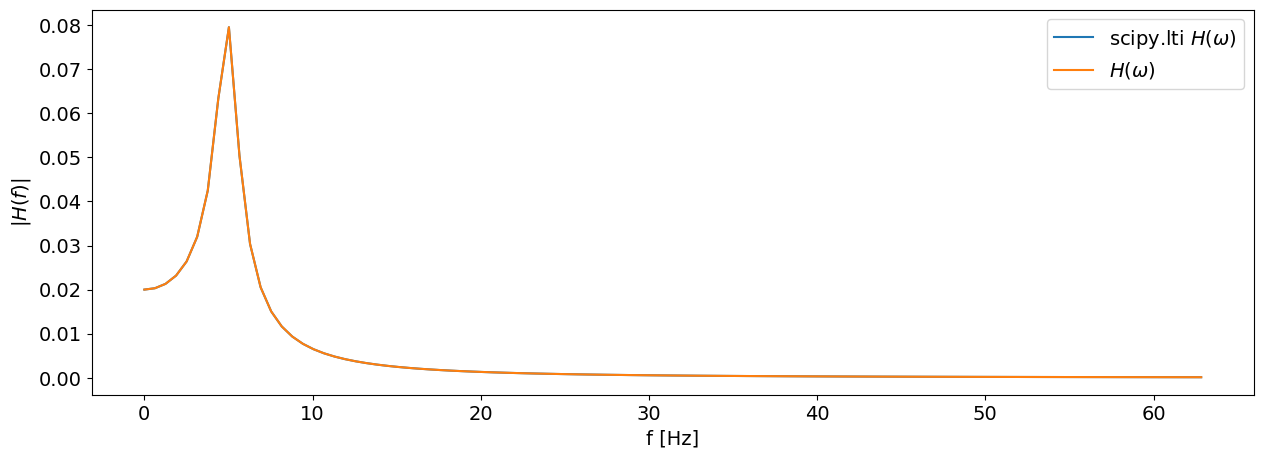
Primerjajte frekvenčno in impulzno prenosno funkcijo, pripravljeni na podlagi zgornje enačbe, s tistima, ki ju dobite z lti.freqresp ter lti.impulse.
T = 1 / (freq[1] - freq[0])
dt = 1/ (2*freq[-1])
t = np.arange(0, T+dt, dt)
Spomnimo se, frekvenčna prenosna funkcija \(\alpha(\omega)\) in impulzna prenosna funkcija \(h(t)\) sta Fourierov par:
h = np.fft.irfft(H_f(freq, m, k, c), n=2*(len(freq)-1)+1)
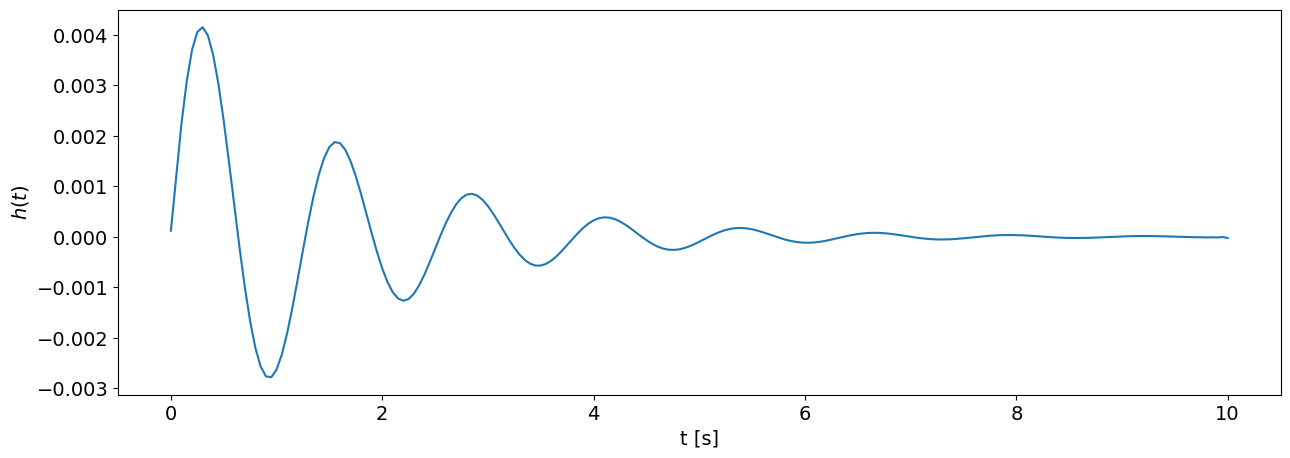
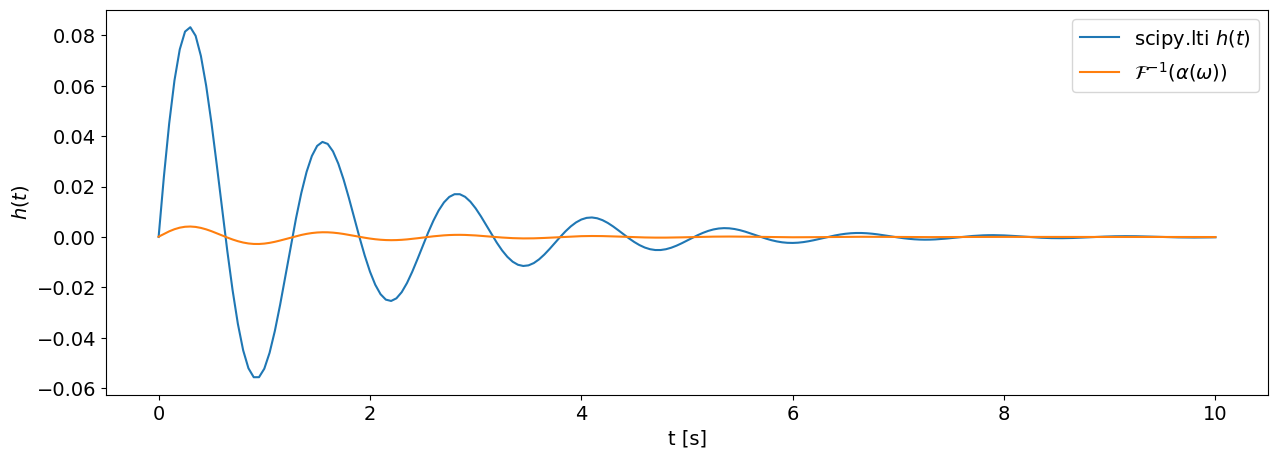
Opazimo, da sta izračunani impulzni prenosni funkciji različno normirani.
Naloga 2 (20 minut): lastnosti LTI sistemov
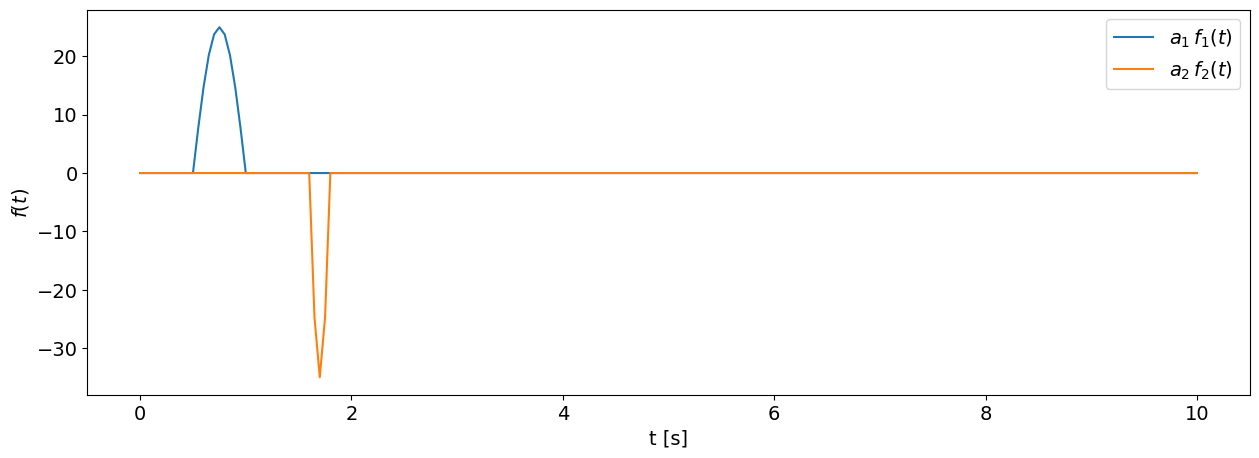
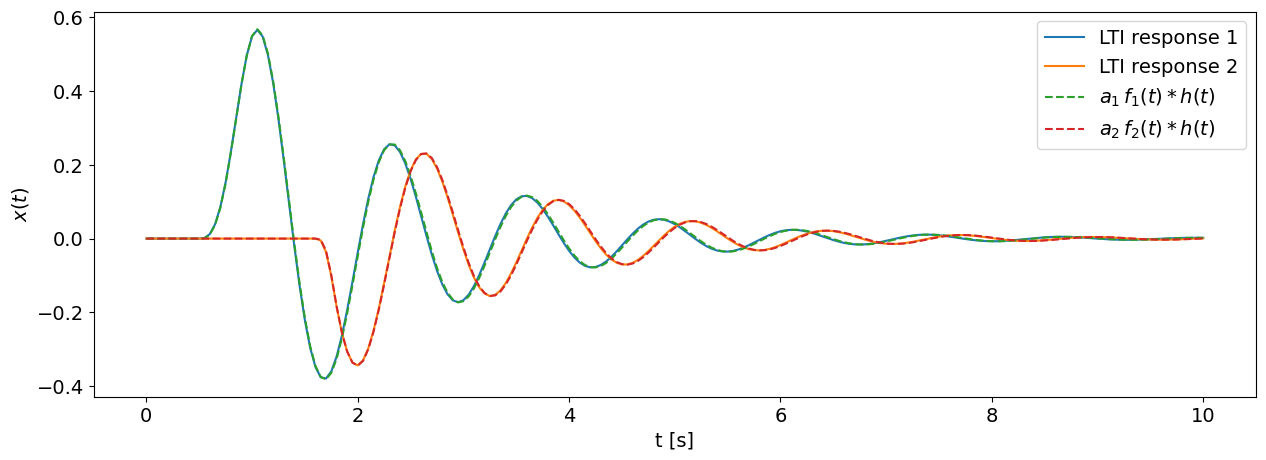
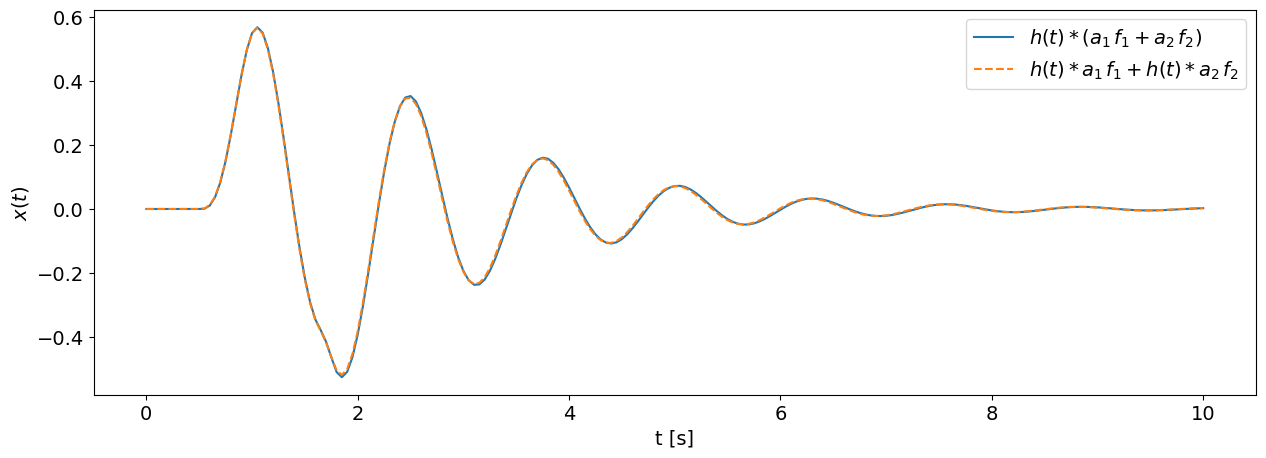
Z uporabo zgoraj pripravljene impulzne prenosne funkcije \(h(t)\) ter lti.output na dva načina prikažite načelo superpozicije:
in lastnost časovne invariantnosti:
LTI sistema.
Uporabite spodaj pripravljena signala \(f_1\), \(f_2\) ter vrednosti konstant \(a_1\), \(a_2\).
a_1 = 25
a_2 = -35
f_1 = np.zeros_like(t)
f_1[10:20] = np.sin(2*np.pi*np.arange(10)/20)
f_2 = np.zeros_like(t)
f_2[32:36] = np.sin(2*np.pi*np.arange(4)/8)
Obdelava signalov za oceno impulzne prenosne funkcije#
Naloga 3 (30 minut): Prenosne funkcije nosilca
Na primeru nosilca, obravnavanega na prejšnji vaji, ocenimo izmerjene frekvenčne prenosne funkcije pospešenosti nosilca.
Naložimo datoteko z meritvami:
meritev_pot = 'data/06/meritev.lvm'
meritev = lvm_read.read(meritev_pot)
Izberimo eno od obravnavanih točk.
Za demonstracijo pomena obdelave zajetih signalov uporabimo le del zajetih časovnih vrst (\(T_{\text{analiza}}\)).
točka = 7
T_analiza = 0.5
dt = meritev[točka]['Delta_X'][0]
N = int(T_analiza * 1/dt)
print(meritev[točka]['Y_Unit_Label'])
['Newtons', 'g', '']
f, a_g = meritev[točka]['data'][:N].T
a = a_g * 9.81
t = np.arange(len(f)) * dt
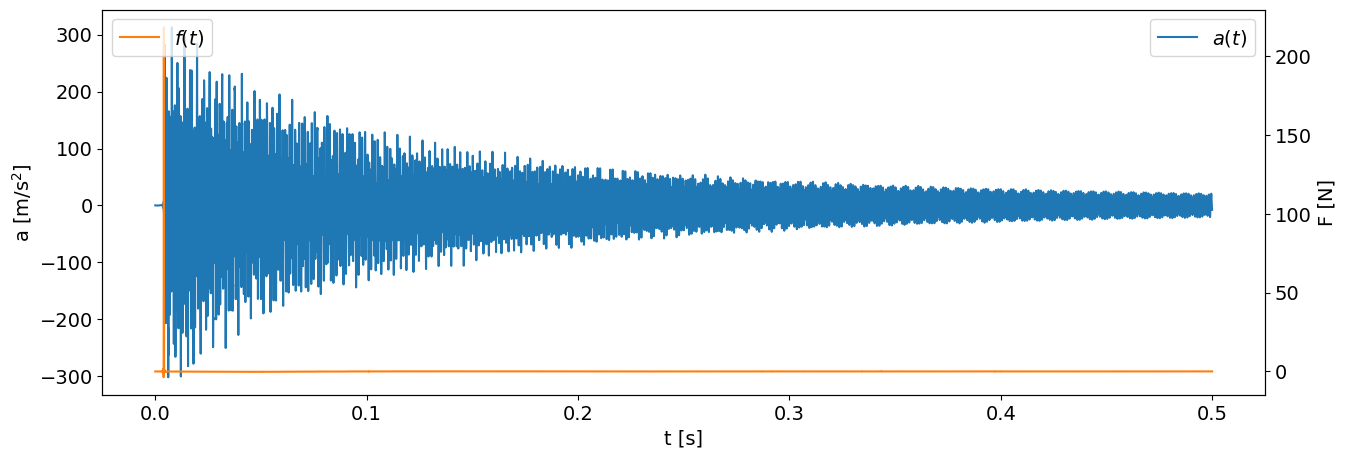
Opazimo, da se v opazovanem časovnem intervalu zajet odziv sistema ne izniha popolnoma.
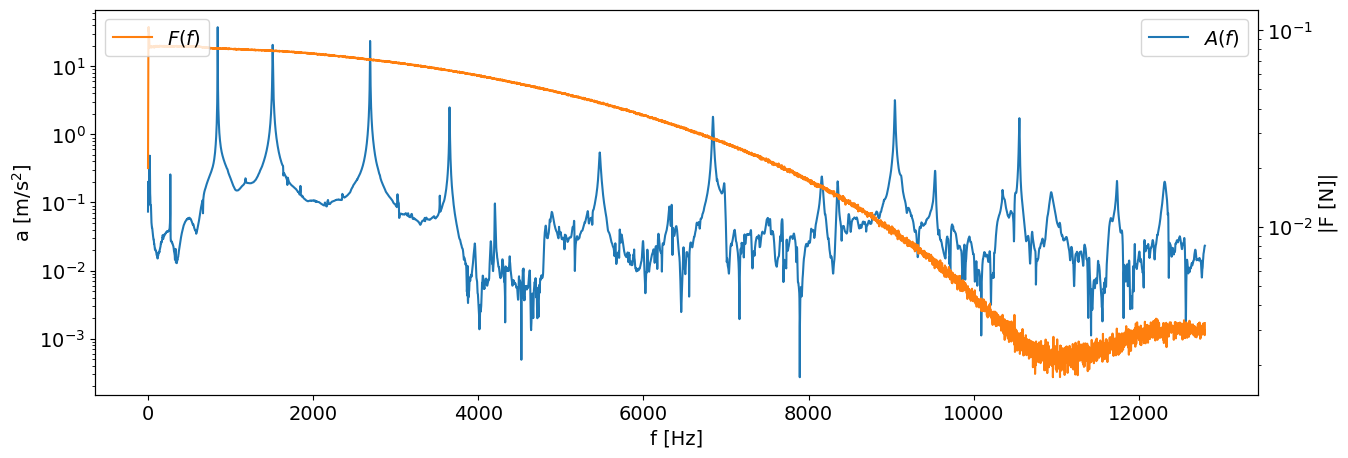
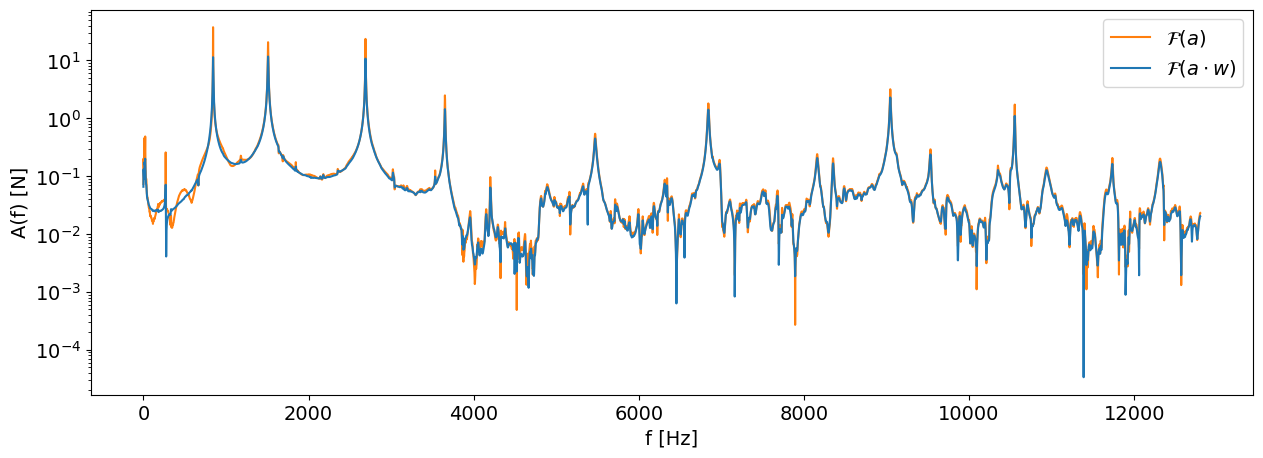
Poglejmo amplitudna spektra zajetih signalov za izbrano točko:
F = np.fft.rfft(f) / len(f)
F[1:] *= 2
A = np.fft.rfft(a) / len(a)
A[1:] *= 2
freq = np.fft.rfftfreq(len(t), dt)
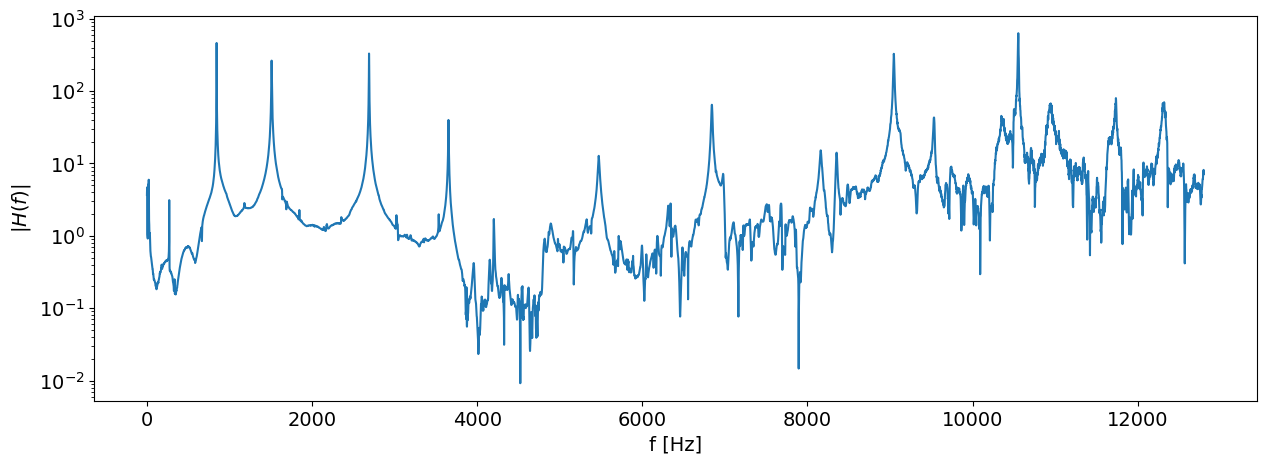
Ocenimo frekvenčno prenosno funkcijo:
H = A / F
Ekponentno okno#
Da zadostimo predpostavki periodičnosti signala v primeru, ko se odziv sistema v zajetem časovnem intervalu ne izniha, uporabimo t. i. eksponentno okno:
Namesto parametra časovne konstante \(\tau\) pogosto želimo podati končno amplitudo \(p\) (v obliki deleža začetne amplitude), ki jo okno doseže pri času \(T\). Velja:
p = 0.01 # 1 %
tau = -(len(t) - 1) / np.log(p)
w_exponential = signal.windows.exponential(len(t), center=0, tau=tau, sym=False)
w_exponential[-1]
np.float64(0.010000000000000004)
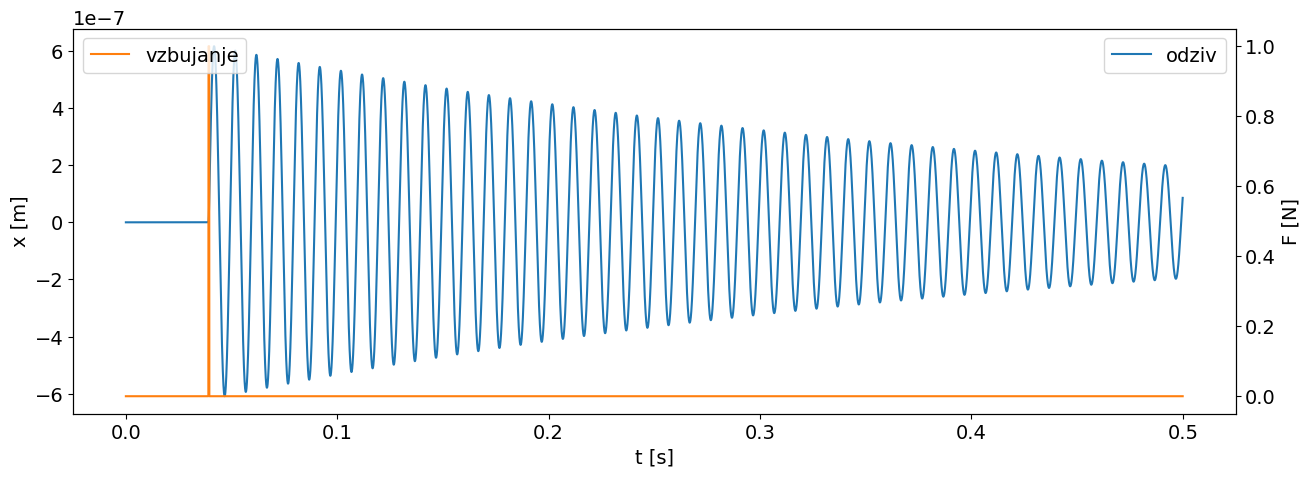
Primer uporabe eksponentnega okna na numeričnem modelu#
k2 = (100*2*np.pi)**2
m2 = 1
c2 = 5.
sistem_primer = signal.lti([1], [m2, c2, k2])
f_primer = np.zeros_like(t)
f_primer[1000:1010] = 1.
t, x_primer, _ = sistem_primer.output(f_primer, t)
X_primer = np.fft.rfft(x_primer) / len(t)
X_primer[1:] *= 2
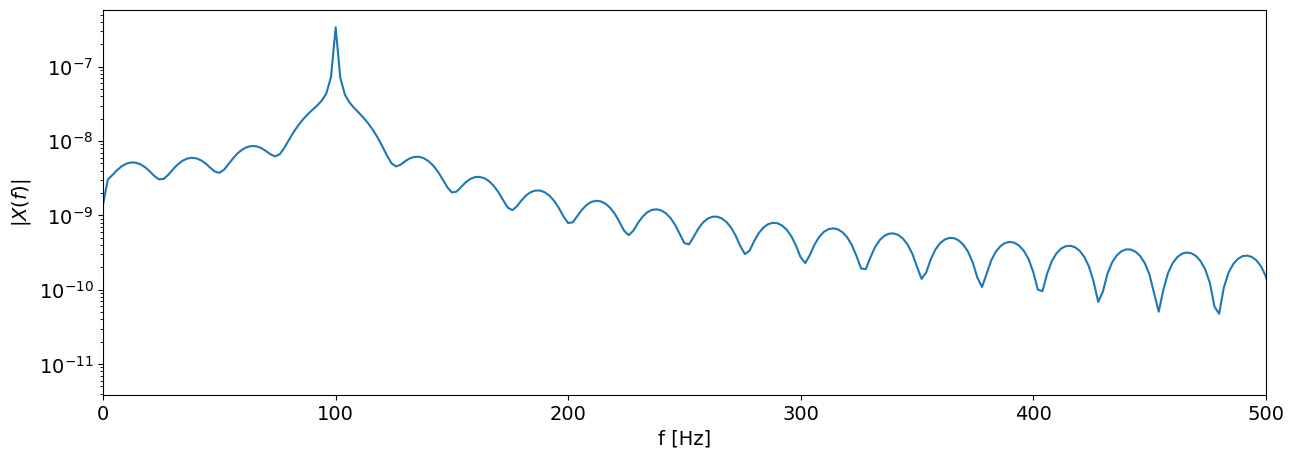
Ker v opazovanem časovnem oknu nismo zajeli popolnoma periodičnega signala, v amplitudnem spektru opazimo pojav frekvenčnega odtekanja (ang. Spectral Leakage).
Odpravimo ga lahko z ustrezno uporabo oken.
X_okno = np.fft.rfft(x_primer*w_exponential) / len(t)
X_okno[1:] *= 2
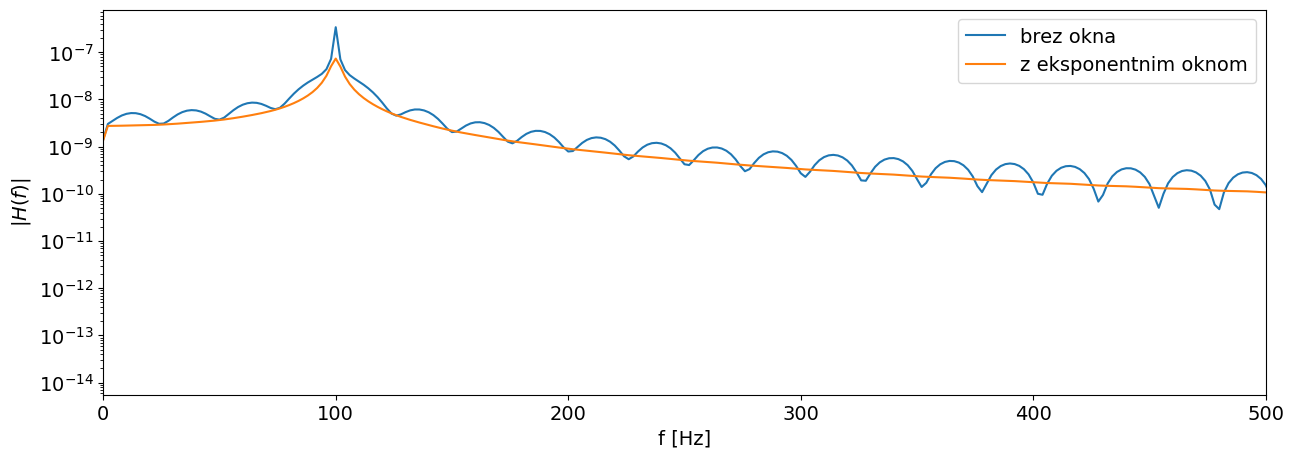
F_primer = np.fft.rfft(f_primer) / len(t)
F_primer[1:] *= 2
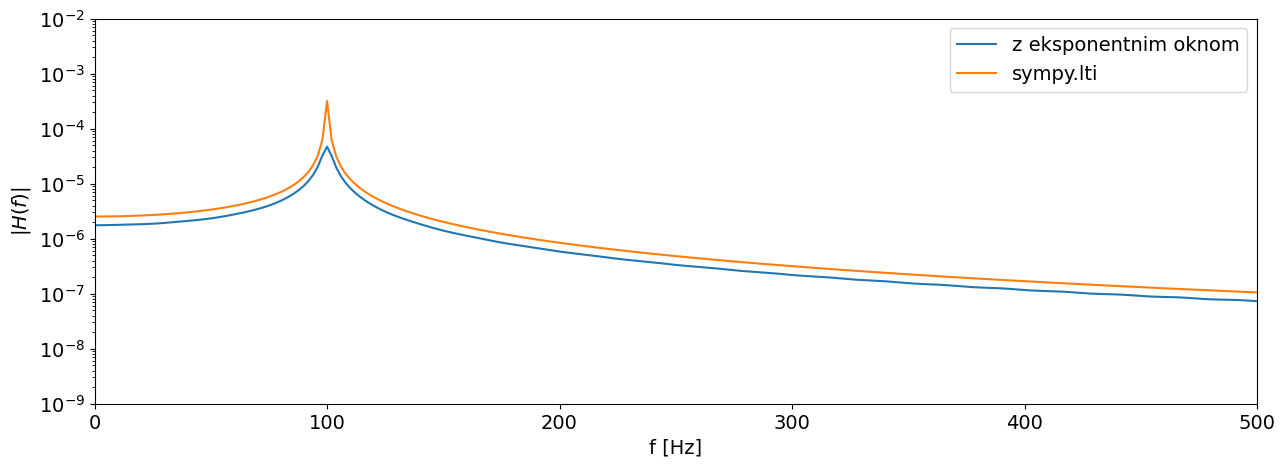
w, H_primer = sistem_primer.freqresp(2*np.pi*freq)
H_okno = X_okno/F_primer
Uporaba eksponentnega okna na meritvi nosilca#
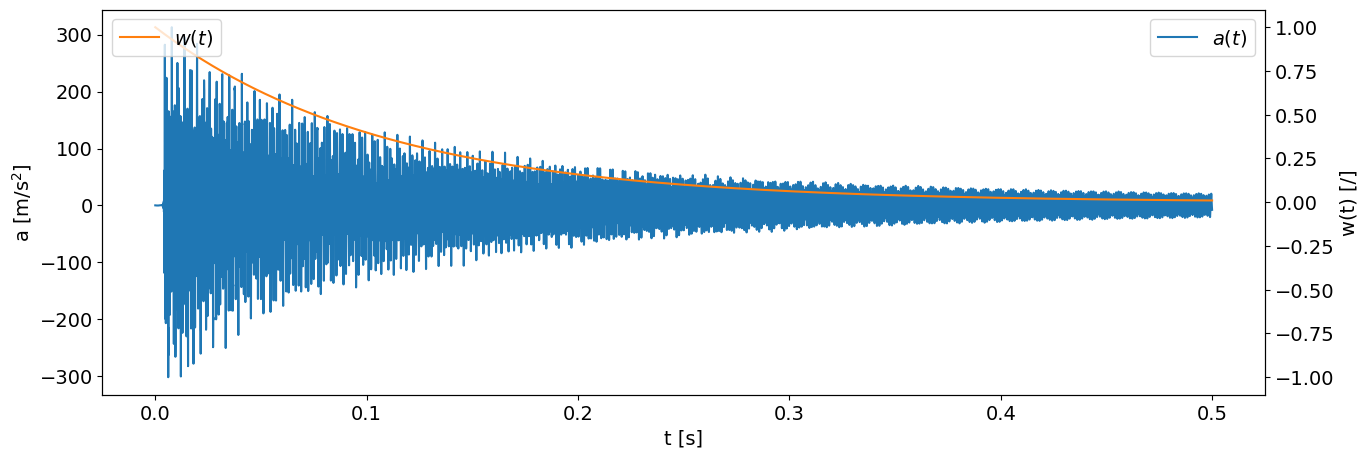
a_w = a * w_exponential
A_w = np.fft.rfft(a_w) / len(a_w)
A_w[1:] *= 2
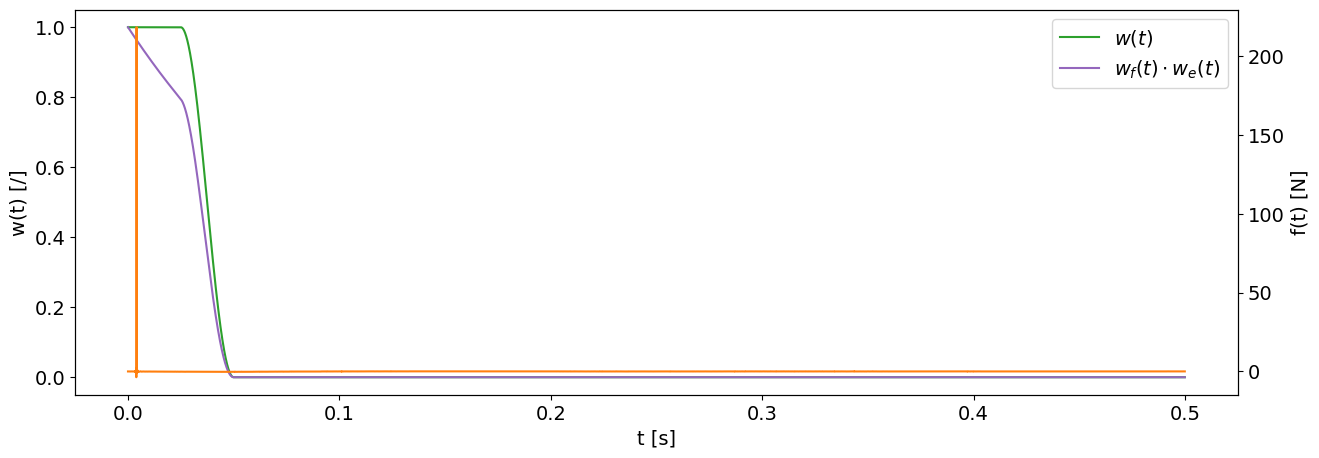
Force okno#
Da zmanjšamo vpliv šuma na vhodnem signalu \(f(t)\) uporabimo t. i. “force” okno, s katerim izničimo vrednosti signala sile po koncu udarca.
Parameter “force” okna je dolžina segmenta okna (v obliki deleža skupne dolžine signala) z enotsko amplitudo, ki jo bomo označili z \(l_w\).
Pri pripravi “force” okna si lahko pomagamo z oknom kosinusnega upada scipy.signal.windows.tukey.
l_w = 0.1
N_w = int(l_w * len(t))
w_force = np.zeros_like(t)
w_force[:N_w] = signal.windows.tukey(len(t)*2, alpha=0.05)[-N_w:]
Ker smo na signalu odziva uporabili eksponentno okno, moramo eksponentno okno uporabiti tudi na signalu sile.
w_f = w_force * w_exponential
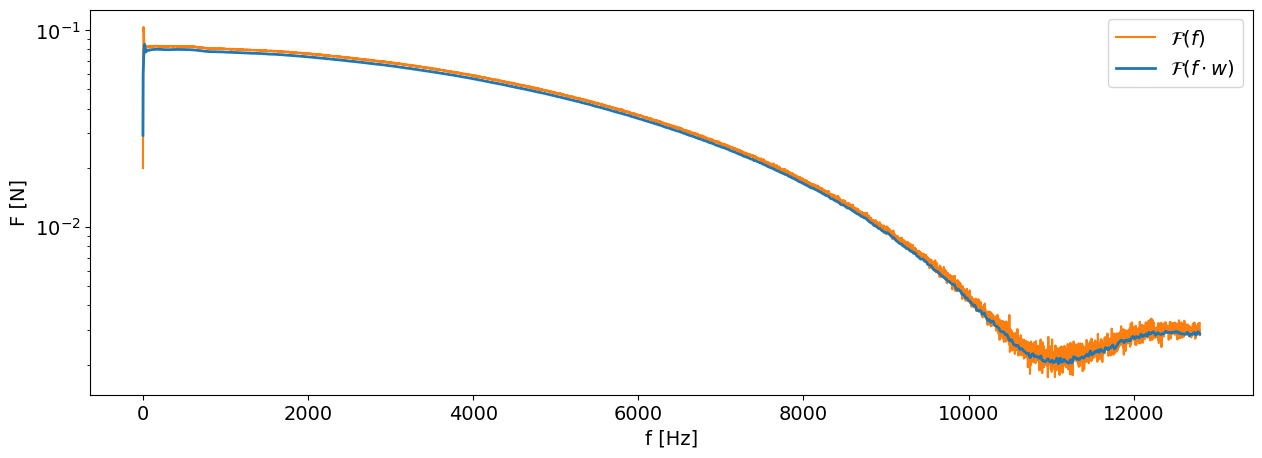
Uporaba force okna:
f_w = f * w_f
F_w = np.fft.rfft(f_w) / len(f_w)
F_w[1:] *= 2
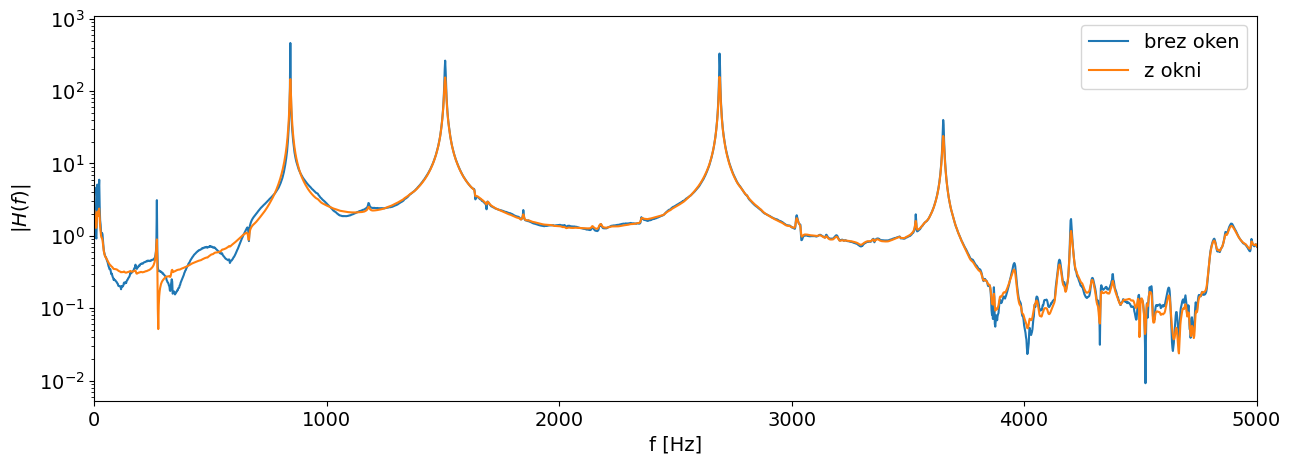
FRF z okni#
H_w = A_w / F_w